Dobb·E
About Dobb·E
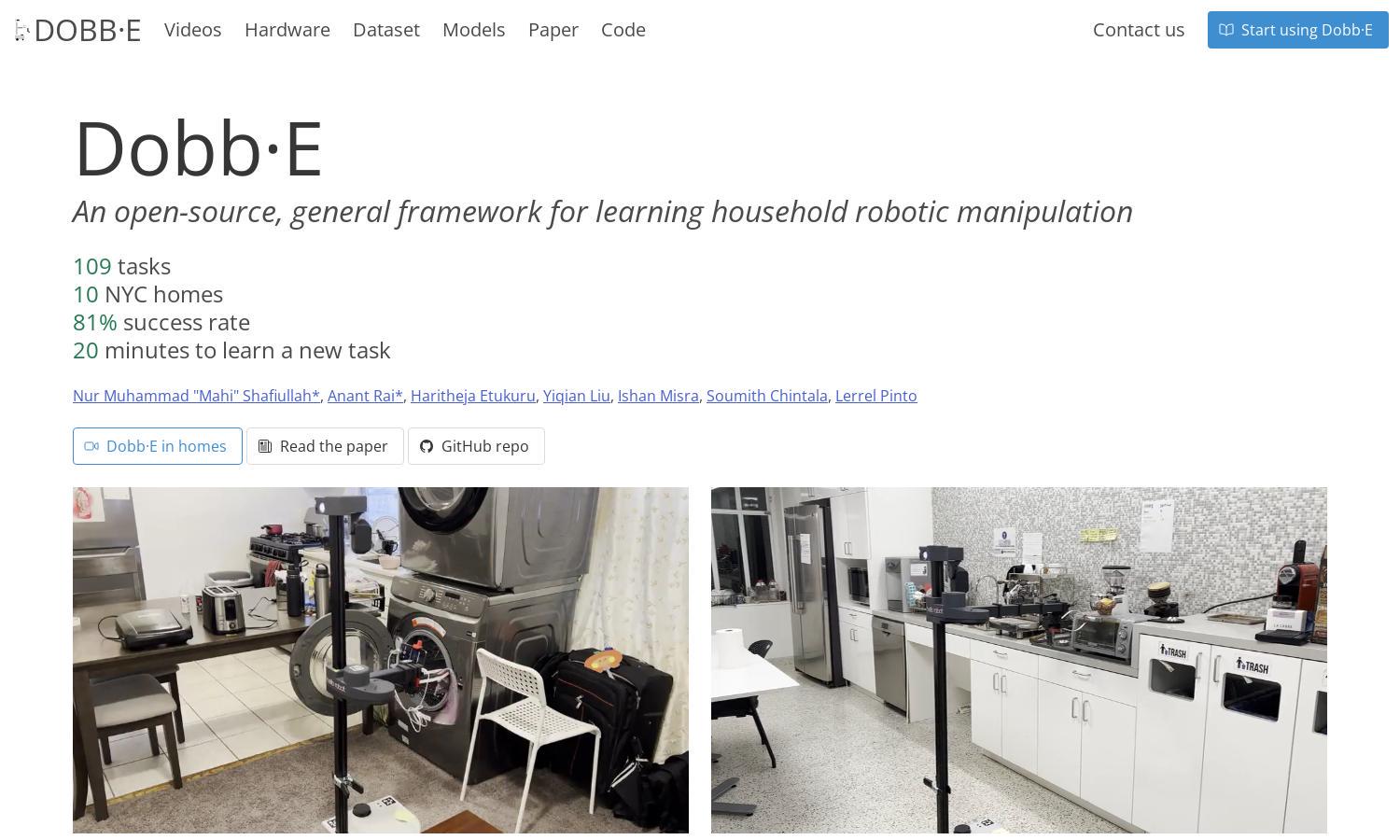
Dobb·E is an innovative open-source platform designed for teaching robots household manipulation in a short time. Users can train the robots with just five minutes of demonstrations followed by fifteen minutes of adjustment. With robust success rates, Dobb·E aims at revolutionizing home robotics.
Dobb·E offers users an open-source framework for free with robust features. No subscription tiers exist, ensuring equal access to all individuals interested in home robotics, facilitating research and experimentation. This approach encourages community contributions and reduces barriers to entry for aspiring roboticists.
Dobb·E features a user-friendly interface that simplifies the process of teaching robots household tasks. Its clean layout and intuitive design ensure an engaging user experience while enabling quick access to vital resources and tools, making it easier to navigate and utilize various functionalities effectively.
How Dobb·E works
To start using Dobb·E, users simply collect task demonstrations with the Stick tool, which captures the necessary data for training. After gathering five minutes of demonstration footage, users can initiate a fifteen-minute adaptation process for the robot. Dobb·E's structure allows for rapid learning and adjustment, ensuring effective task performance within homes.
Key Features for Dobb·E
Imitation Learning Capability
Dobb·E's imitation learning capability is its standout feature, allowing robots to pick up household tasks in just 20 minutes. By using a simple tool to collect data, users can train their robots efficiently, making Dobb·E an appealing option for those exploring home automation solutions.
The Stick Demonstration Tool
The Stick is a unique demonstration collection tool designed for Dobb·E, facilitating easy and cost-effective data gathering for robot training. Built from affordable parts, it empowers users to demonstrate tasks effortlessly, enhancing the overall learning process for the robot and ensuring better adaptability.
Home Pretrained Representations (HPR)
Home Pretrained Representations (HPR) is an essential feature of Dobb·E, offering a pre-trained model that accelerates robots' learning in new environments. This unique model supports efficient task performance, helping to ensure a high success rate, further enhancing user satisfaction and experience with home robotics.
You may also like: